


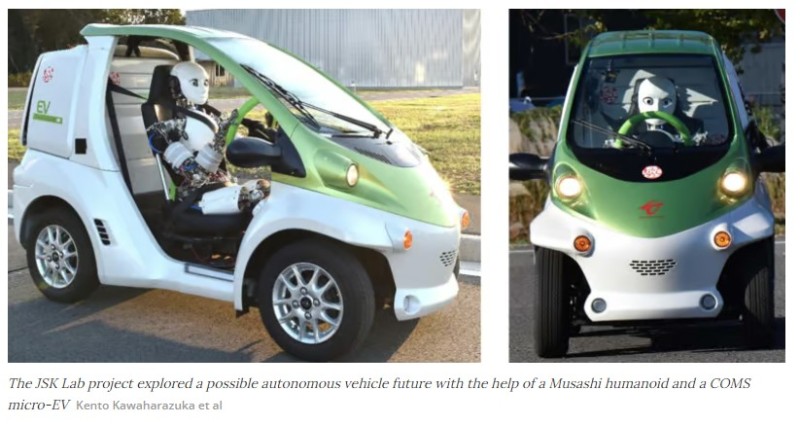
Japanese researchers have released footage of a humanoid robot called Musashi sitting in the driving seat of an electric micro-car to examine a possible future direction for autonomous vehicle technologies.
The current push for autonomous vehicles pretty much follows the same path, where technologies such as LiDAR, vision cameras, GPS, complex algorithms and controls systems are installed throughout the Johnny Cab and work together to safely navigate city streets and beyond.
At least that's the general idea, although real-world deployment has been something of a mixed bag of successes and headline-grabbing failures. But what if cars didn't need to pack all this advanced tech to get from A to B without a human driver at the wheel? That's the direction that University of Tokyo researchers and Musashi are headed.
Musashi is a "musculoskeletal humanoid" developed by the research group in 2019 as a testbed for learning control systems. The form factor not only has similar proportions to a human counterpart but also features a "joint and muscle structure" inspired by the human body.
The robot has now found use in an autonomous driving project where it's been trained by members of the Jouhou System Kougaku Lab to master driving in a similar way to humans.
Musashi's head is home to a high-resolution vision camera in each movable eye, which can pan and tilt to obtain different views of the world – straight ahead, for example, or quickly checking side mirrors. Five-digit hands on the end of jointed arms turn the steering wheel as determined by the learning software and sensor data, while also being able to pull the handbrake, turn an ignition key and operate turn signaling. And grippy feet push down on brake and accelerator pedals when needed.
The humanoid sits in the driving seat of a business variant of a single-seater electric micro-car named the COMS (Chotto Odekake Machimade Suisui), which was launched by Toyota in 2012. The team equipped the vehicle with a Wi-Fi router and Intel NUC PC to run the recognition module as well as a servo power supply, though expects such things to be incorporated into future humanoids.
The real-world driving tests were undertaken at the University of Tokyo's Kashiwa Campus, where Musashi hit the brakes when a human was detected or a car horn sounded, and also responded to traffic lights. But it wasn't all smooth going, as the software wasn't trained to handle inclines so maintaining a constant crawl up hills proved problematic, and turning a corner took minutes rather than seconds.
But it's obviously very early days for autonomous driving by humanoid. Assuming development continues apace, potential advantages to this method over cars kitted out with autonomous driving tech might include the vehicle itself not needing to be modified, and the robot driver being able to undertake other tasks between trips (such as carrying the shopping or switching roles to household helper). The researchers also say that the sensor-packed robot could serve as a crash test dummy for automakers.
A paper on the project was first presented at ICRA 2021 is now available on arXiv.